Dans le cadre du Pôle projet « Robotique », pôle dont les responsables sont Maria Makarov et Giorgio Valmorbida, un projet de recherche mené par Sorin Olaru, professeur CentraleSupelec, co-encadré par Turan Konyalioglu, doctorant de l’école, accompagné de trois élèves de première année, Marius Jaegler, Mickaël Martinelli et Valentin Carrez, a abouti à une publication lors de la conférence ICARCV 2024 (International Conference on Control, Automation, Robotics and Computer Vision) à Dubaï, en décembre dernier.
Cette conférence, l'une des plus renommées dans le domaine de la robotique, du contrôle, de l'automatisation et de la vision par ordinateur, a abordé des sujets de pointe, notamment l'intelligence artificielle, la théorie du contrôle, la robotique mobile, et la vision par ordinateur. Les travaux présentés ont été largement cités, témoignant de leur impact et de leur pertinence dans les domaines de la robotique moderne.
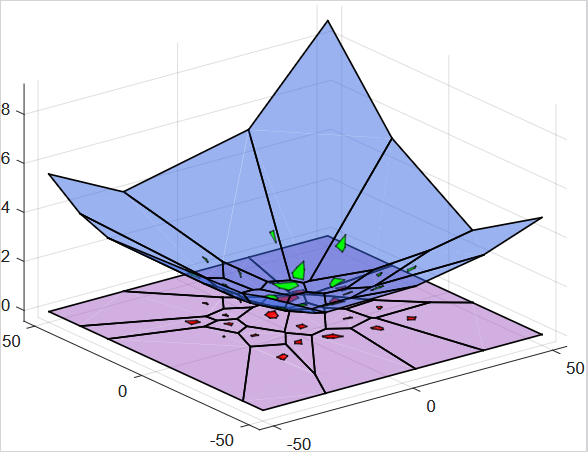
Le projet "Constructing the Convex-Lifting Tools for Path Planning and Control" est au cœur de cette publication. L'article, intitulé "Application à la planification de la trajectoire (robotique) et à l’Automatique”, propose une boîte à outils innovante pour la construction des augmentations convexes par des fonctions affines. Cette boîte à outils est conçue pour fournir des partitions efficaces dans des espaces à dimensions finies, une avancée significative dans le domaine de la robotique et de la planification de trajectoires. L'approche repose sur une optimisation performante (programmation linéaire) et la manipulation de polyèdres, créant ainsi des graphes d’interconnexion qui facilitent la planification de chemins pour les robots autonomes.
L'article décrit en détail la structure de la boîte à outils, ses fondements théoriques, ainsi que des exemples pratiques illustrant son efficacité et sa polyvalence. Cette recherche ouvre de nouvelles perspectives dans le contrôle par rétroaction et la planification de trajectoires en robotique, des domaines essentiels pour le développement de robots autonomes et de systèmes de contrôle complexes.
"Cette expérience particulièrement enrichissante a permis, après plusieurs années de recherche fondamentale, de développer un ensemble d'outils accessibles au grand public, avec des applications variées en robotique, logistique et automatique. Ce qui est particulièrement enthousiasmant, c'est que nos élèves ont su assimiler ces concepts rapidement et, grâce à leur travail, contribuer à une avancée qui renforce la portée et la valorisation de notre recherche." témoigne Sorin Olaru.
Félicitations à Sorin Olaru et Turan Konyalioglu pour leurs travaux de recherche ainsi qu'à Marius Jaegler, Mickaël Martinelli et Valentin Carrez pour leur travail exceptionnel, qui démontre non seulement l'excellence académique des étudiantes et étudiants de CentraleSupélec portés par leurs enseignantes et enseignants, mais aussi l'importance de la collaboration entre le corps enseignant, les chercheurs et les élèves dans le cadre de projets de recherche.
- Se connecter pour poster des commentaires